Introduction
In the last blog, we delved into the introduction to a Battery Management System (BMS) and explained its role in managing and protecting battery packs. We discussed the importance of accurate estimations of battery parameters such as State of Charge (SoC), State of Health (SoH), State of Power (SoP), and Distance to Empty (DTE). The blog also highlighted the factors that affect the accuracy of parameter estimations. It emphasized the need for precise estimations to ensure effective battery management and optimal battery performance, as battery packs are the major contributors to the cost of an EV (close to 50% in some cases).
This blog focuses on improving state estimations’ accuracy, specifically SoC for Li-ion battery packs. Accurate SoC estimation is crucial for efficient battery usage, and using Extended Kalman Filters ensures that the estimated SoC is the most accurate.
SoC Estimation
Li-ion batteries are critical in our daily routines, powering smartphones, laptops, and electric vehicles. The lithium-ion (Li-ion) battery is a popular type of battery in these devices because of its high energy storage capacity and extended lifespan. Accurately estimating the Li-ion battery’s state of charge (SoC) is critical for optimal performance. The Extended Kalman Filter (EKF), a specialized algorithm, plays a crucial role here.
So, what exactly is the EKF, and how does it work? Let’s break it down in simple terms.
The Extended Kalman Filter (EKF), a variant of the Kalman Filter, is used to estimate the vehicle’s state, such as its position, velocity, and orientation, based on sensor measurements and a mathematical model.
There are two steps in this algorithm: the Prediction and the Correction.
Prediction step:
The prediction phase uses the state estimate from the previous timestep estimate at the current timestep. For instance, if we’re predicting SoC at t=1sec, we use measurements at t = 1 sec and estimates at the previous timestep, let’s say SoC at t = 0.9. Although predictions are made for the current timestep, observations from the current timestep are not included.
xk = f(xk-1, uk-1)
Where:
xk: Predicted state estimate at time k
f: Process model that describes the system dynamics
xk-1: State estimate at time k-1
uk-1: Control input at time k-1
Correction step:
After the prediction step, the EKF moves on to the correction step. This step compares its prediction with actual measurements of the battery’s voltage, current, and temperature to ensure accuracy. If not, the EKF adjusts its internal parameters based on the error between measurement and estimation to get a more accurate SoC estimate. This correction process helps the EKF adapt to the changing battery behavior and environmental conditions, such as high/low temperature and heavy usage.
xk = xk + KGk(yk – h(xk))
Where:
xk: Corrected state estimate at time k
KGk: Kalman Gain at time k
yk: Measurement at time k
h: Measurement model that relates the state to the measurements
Why Extended Kalman Filter?
Voltage vs. SoC
The most basic estimation methods typically use the ‘Voltage vs. SoC plot (V vs. SoC)’ or the ‘Coulomb Counter (CC)’ technique have some elementary flaws. These are mostly due to errors in the measurements of voltages, currents, and the transients of a cell while switching larger currents in and out of the battery pack. The first method (V vs. SoC) depends on the Open Circuit Voltage of a cell, which requires the cell to be resting (dependent on the currents being drawn before the rest period, but at least 10 mins). Therefore, using this method, the SoC can only be estimated when the vehicle is switched OFF for some duration. However, we expect the instantaneous SoC while the vehicle is in motion.
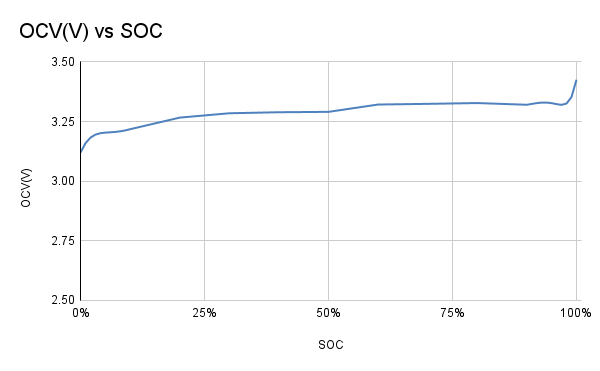
Another critical issue with this method is that the Open Circuit Voltage (OCV) vs SoC plot is mostly flat in the high operation range for the battery. The figure below depicts the OCV vs SoC plot for a typical LFP (Lithium Iron Phosphate) cell. The major voltage drop occurs only between 100-90% and 10-0% SoC, while the plot is mostly flat in the high operation range of 90-10% SoC. This characteristic makes it almost impossible for a BMS to estimate SoC by employing this method.
Coulomb Counting
Let’s move on to the second method, Colomb counting (CC), which runs a high-frequency and high-resolution sensor that literally counts the (theoretically exact) amount of charge that has flown in & out of the battery pack. The counting is done using simple integration of the charge over some time. However, the inaccuracy in measurement introduces an error in the integration, thereby providing an incorrect count of the coulomb value. The sampling rate for counting coulombs can be as quick as once every few microseconds. On the other hand, in an operational vehicle, the transients can occur much quicker, thus resulting in inaccuracies in the count and, thereby, the estimation of SoC.
On the other hand, a Kalman Filter combines the data obtained with a pre-built math model of a cell to make corrections to the SoC, thereby providing more accuracy to the reality of a battery cell. The Extended Kalman Filter also uses the battery cell’s characteristic data to further improve the estimations during the dynamics (varying currents and surges, etc.) of a cell’s usage.
Sustained accuracy in SoC estimations
The importance of accurate SoC estimation cannot be overstated. It enables efficient battery usage by optimizing charge and discharge cycles, avoiding overcharging or over-discharging, which can degrade the battery’s performance and shorten its lifespan. Accurate SoC ensures better battery management, ensuring that Li-ion batteries in our devices and electric vehicles function optimally for a long time. As Li-ion batteries continue to power our everyday devices and electric vehicles, understanding estimation algorithms like the EKF can help us design the software of a BMS that makes the most of a battery cell’s capabilities and ensures its longevity.
One of the strengths of the EKF is its ability to handle unexpected battery behavior. The EKF uses mathematical models and measurements to adapt its estimate to dynamic changes, making it robust when dealing with variations in battery behavior and ensuring accurate SoC estimation even in challenging conditions. It also utilizes the internal parameters of a cell, like internal capacitances and resistances. The Hybrid Pulse Power Characterization (HPPC) test determines these parameters. The HPPC helps determine a cell’s internal characteristics by testing its dynamic performance across its range. These accurate measurements are essential for the EKF and must be updated as the battery ages to ensure the state estimation remains faultless. Thus, the EKF ensures accurate state estimation over the entire life of a battery pack, even as the battery parameters vary with time.
However, for the EKF to work effectively, it relies heavily on accurate math models and measurements. Scientists and engineers work diligently to develop precise mathematical models that can be used to understand the behavior of Li-ion batteries and then calculate the required important information from a battery pack during its operation. These models and measurements are critical inputs to the EKF, as they determine the accuracy of the SoC estimation.
Conclusion
We have explored the significance of accurate state estimations, particularly State of Charge (SoC), to ensure efficient battery management. The Extended Kalman Filter (EKF) has emerged as a powerful algorithm for precise SoC estimation, adapting to dynamic changes, and ensuring optimal battery performance.
By understanding these estimation algorithms and implementing the recommended practices, we can maximize the potential of battery systems and prolong their lifespan. However, our exploration doesn’t end here. In the next blog, we will dive into the exciting world of estimating the State of Health (SoH).
Join us in the next blog as we unravel innovative approaches and algorithms for estimating SoH. With Autoven, stay updated with valuable insights that will further enhance your understanding of battery management and empower you to make informed decisions about battery systems. Remember, accurate estimations are the key to unlocking the full potential of your batteries and optimizing their performance. Stay tuned for the next blog!